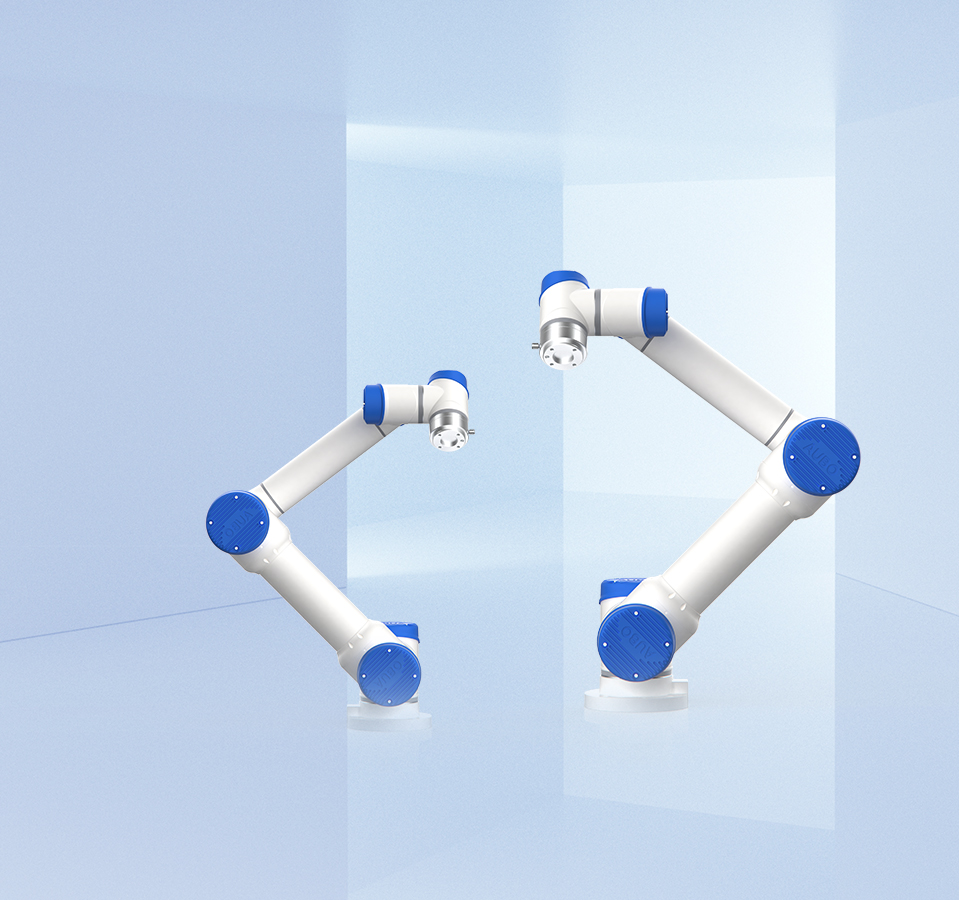
协 作 机 器 人
一站式解决方案提供商
协 作 机 器 人
一站式解决方案提供商

三次元测量支撑
关键物料全尺寸、全功能、全数量检测覆盖
振动测试、高温老化测试、Dynalog
重复精度测试、噪音测试、莱卡激光标定


轻便小巧,占地面积小 部署机械臂来执行新任务平均只需要半天

多种功能场景快速切换,可以采用人机协作、 双机协作、多机协作等实现柔性化生产

半小时可掌握编程方式,1小时可完成简易编程 拖动示教、可视化编程简便高效,无需精通编程语 言即可轻松操作机器人

已在3C、汽车、五金家电、厨卫洁具、医 疗健康、科研教育、餐饮、新零售、日化、 物流等行业领域批量应用

产品通过 EN ISO 13849-1:2015(PL=d, CAT 3)、 欧盟 CE、北美 NRTL、韩国 KCs、中国 CR、 SEMI S2、洁净度class5级等认证

多种语言环境对接、多种通讯协议、第三方插件深度集成 通讯协议:TCP/IP、Modbus-RTU/TCP、Profinet 接口与开放性:SDK(支持C/C++/C#/Lua/Python开发)、API

15分钟内可实现快速拆装和更换 维修保养更加快速与便捷

关键核心部件100%中国制造 平均6 -12 个月内收回投资成本

毫秒级系统响应速度确保定位精度 重复定位精度可达±0.02mm
价值观念:产品通过 EN ISO 13849-1:2015(PL=d, CAT 3)、欧盟 CE、北美 NRTL、 韩国 KCs、中国 CR 、SEMI S2、洁净度class5级等认证,核心部件全国产化,支持 10级碰撞检测和传感器安全检测,无需安全防护
更开放:开放的系统平台,支持SDK、API,多种通讯方式,可与多种末端治具、视觉、 移动等外围设备建立通讯
更精准:重复定位精度可达±0.02mm,可长时间连续完成高精度要求的工作,大幅提 高生产良率
更简单:可选择拖拽示教、坐标定位、路径规划、离线编程等多种方式操作机器人,可 视化界面简单易学
更广泛:全系列产品提供3-20KG不同负载能力,可覆盖各行业差异性应用,应用范围 广泛

多位一体:多合一控制系统可灵活控制协作机器人、移动底盘、视觉等设备,省却繁杂操作,实 现一键协同体验
信息直达:实时获取各设备状态,信息一步直达、无缝流转。机械臂示教器可以实时读取移动底 盘位置、速度、电量、I/O显示及控制、激光阻挡状态、导航状态、报警日志等
扩展灵活:可灵活搭配不同负载的协作机器人、移动底盘、2D/3D视觉、末端工具等,实现跨设 备间的高效协同扩展,满足不同行业的负载及场景需求
简单易用:协作机器人、移动底盘、视觉系统的编程集成到同一个编程软件上使用,流程图编程, 具有允许用户编辑的任务模块软件,用户可根据自身需求设计机器人的行为,采用视觉引导机械 臂实现高精度定位,与传统编程方式兼容,降低系统使用难度
安全调度:采用高精度SLAM激光雷达进行导航与定位,双轮差速运动控制,移动更加平稳; 激光数据安全辅助,人员靠近移动底盘时,机械臂降速运行,保证安全
协同作业:通过遨博一体化操作系统,可实现协同控制协作机器人、移动底盘、视觉等设备,支 持单机操作和多级调度方案